แนะนำบอร์ด KB32-FT บอร์ดเล็กหัวใจใหญ่ ฝีมือคนไทยพัฒนา
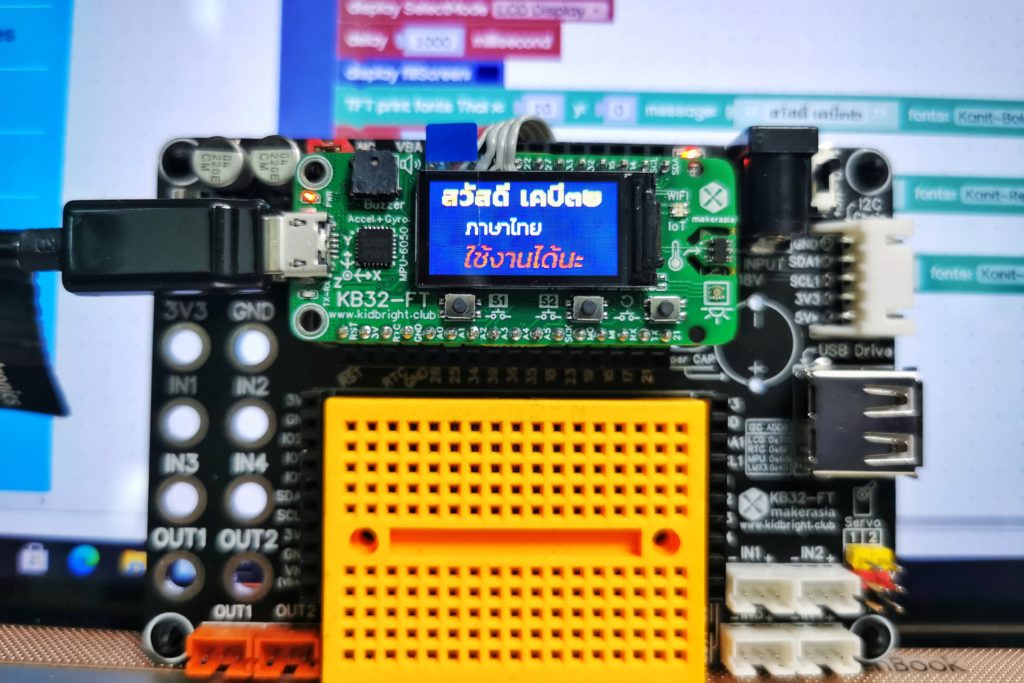
สวัสดีครับ วันนี้ผมจะพาทุกท่านมาทำความรู้จักกับบอร์ดไมโครคอนโทรลเลอร์ที่ชื่อว่า KB32-FT จากบริษัทเมกเกอร์เอเซียกันครับ เราจะมาทำความรู้จักบอร์ดนี้กันว่าทำไมบอร์ดเล็ก ๆ ตัวนี้อัดแน่นเทคโนโลยีอะไรไว้ข้างในได้มากมายขนาดนี้ กับขนาดตัวเพียง 5.3×2.3 ซม. นึ […]
แนะนำบอร์ด KB32-FT บอร์ดเล็กหัวใจใหญ่ ฝีมือคนไทยพัฒนา Read More »