การที่เราใช้ DC motor มาใช้ทำอุปกรณ์ต่างๆ แน่นอนมันก็จะเกี่ยวข้องกับ ความเร็วรอบ ไม่ก็ตำแหน่งองศาการหมุนของ DC motor ซึ่งในสายงานระบบควบคุมก็ต้องมีการคำนวณหาค่าอัตราขยาย หรือ Controller Gain ที่เอาไว้สำหรับปรับแต่งระบบควบคุมของเรานั้นเอง แต่ในการคำนวณหาค่าอัตราขยายจำเป็นต้องรู้ค่าพารามิเตอร์ของ DC motor ก่อนจึงจะสามารถคำนวณหาค่าอัตราขยายที่เหมาะสมกับระบบคุมของเราได้นั้นเอง แต่ก็มีอีกวิธีหนึ่งถ้าเราไม่รู้ค่าพารามิเตอร์ของระบบกับแบบจำลองคณิตศาสตร์ระบบของเรา วิธีที่ใช้ก็คือการสุ่มหาค่าอัตราขยายนั้นเอง อย่างไรก็ตาม การที่เราคำนวณหาค่าอัตราขยายที่เหมาะสมกับระบบควบคุมของเราได้ย่อมดีกว่าการสุ่มอย่างแน่นอน
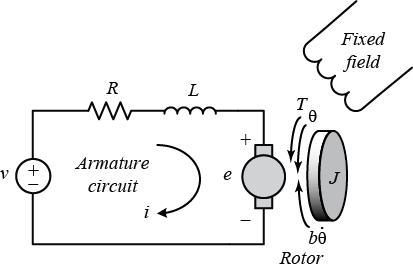
พารามิเตอร์ DC motor ก็แบ่งออกตามแบบจำลองทางคณิตศาสตร์ของ DC motorได้ดังนี้
http://ctms.engin.umich.edu/CTMS/index.php?example=MotorSpeed§ion=SystemModeling
(J) moment of inertia of the rotor (kg.m^2)
(b) motor viscous friction constant (N.m.s)
(Ke) electromotive force constant (V/rad/sec)
(Kt) motor torque constant (N.m/Amp)
(R) electric resistance (Ohm)
(L) electric inductance (H)
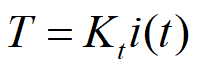
โดยทั่วไปแรงบิด (T) ที่เกิดจาก DC motor ก็คือค่าสัดส่วนกับกระแสไฟฟ้าที่ไหลในอาร์เมเจอร์ โดยสมมติให้ค่าสัดส่วนคือคงที่ (constant factor) ก็สามารถเขียนสมการได้ดังนี้
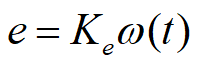
เมื่อไหร่ก็ตามที่ DC motor เกิดการหมุนจะทำให้เกิดแรงดันไฟฟ้าย้อนกลับ (Back emf,e) ก็คือ ค่าสัดส่วนกับความเร็วเชิงมุมของการหมุน DC motor สามารถเขียนสมการได้ดังนี้
เรามาเริ่มหาค่าพารามิเตอร์ DC motor กันครับ โดยผมจะเริ่มจากสิ่งที่ง่ายไปยากนะครับ
1. (R) electric resistance โดยใช้มัลติมิเตอร์ที่มีโหมดวัดความต้านทานปรับไปที่โหมดวัดความต้านทาน จากนั้นจิ้มไปที่ขั้วทั้งสองข้างของ DC motor

2. (L) electric inductance สำหรับวัดค่าความเหนี่ยวนำก็มีหลากหลายวิธีแต่วิธีที่ง่ายที่สุดคือใช้มัลติมิเตอร์ที่มีโหมดวัดค่าความเหนี่ยวนำในตัวซึ่งราคาก็จะแพงหน่อย โดยผมก็มัลติมิเตอร์ปรับไปที่โหมดวัดค่าความเหนี่ยวนำจากนั้นจิ้มไปที่ขั้วทั้งสองข้างของ DC motor ทั้งสองข้าง

3. (J) moment of inertia of the rotor สำหรับสิ่งที่ผมใช้ DC motor หมุนก็จะมีรูปร่างเป็นแผ่นวงกลมมีเส้นผ่านศูนย์กลาง 90 mm มีน้ำหนักประมาณ 27 g

ซึ่งแผ่นวงกลมจุดหมุนอยู่ตรงกลางพอดีดังนั้นสมการที่ใช้ในการคำนวณคือ
แทนเลขเข้าไปเลยครับก็จะได้

4. (Kt) motor torque constant สำหรับหาค่า motor torque constant จำเป็นต้องใช้ Load มาทำการทดสอบซึ่งก็มีหลากหลายวิธีให้เราทดสอบ โดยผมเลือกใช้วิธีการ dyno มาทำการทดสอบ
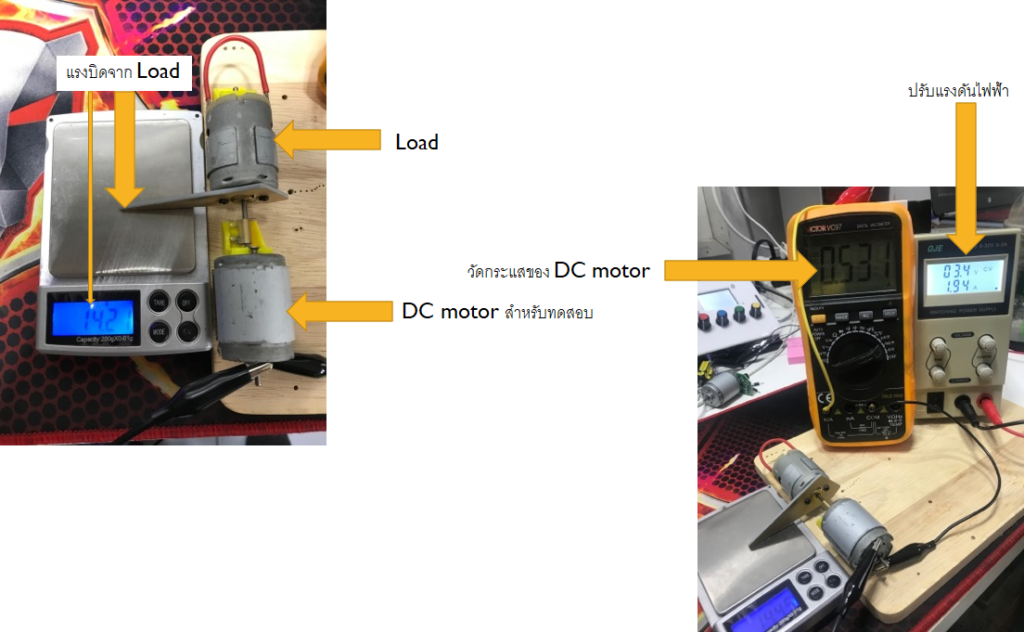
ซึ่งผมได้ทดสอบที่แรงดันไฟฟ้า 6 – 12 V ได้ค่ามาดังตารางนี้
| แรงดันไฟฟ้า (V) | น้ำหนัก(g) | กระแสไฟฟ้า (A) |
| 12 | 40.1 | 1.316 |
| 10 | 34.2 | 1.103 |
| 8 | 25.4 | 0.882 |
| 6 | 20.8 | 0.712 |
จากนั้นผมก็คำนวณหาแรงบิดจากน้ำหนักที่วัดได้ จากสมการด้านล่าง ซึ่งรัศมี (r) ที่ใช้กดตราชั่งน้ำหนักมีค่าเท่ากับ 54 mm
แรงบิดที่ได้ดังตารางนี้
| V | m(g) | I (A) | T (N.m) |
| 12 | 40.1 | 1.316 | 0.021243 |
| 10 | 34.2 | 1.103 | 0.018117 |
| 8 | 25.4 | 0.882 | 0.013455 |
| 6 | 20.8 | 0.712 | 0.011019 |
จากนั้นนำแรงบิดที่ได้จากการคำนวณนำไปหาค่า motor torque constant จากสมการ แล้วนำมาเฉลี่ยกัน
5. (Ke) electromotive force constant สำหรับการหาค่า electromotive force constant จะค่อยข้างซับซ้อนหน่อยเพราะว่าเราต้องทำการค่าความเร็วรอบของ DC motor ที่เราจะใช้งานด้วย ซึ่ง DC motor ที่ผมใช้ทดสอบมีเซนเซอร์ Encoder ที่สามารถวัดการหมุน ติดตั้งมาด้วยทำให้ง่ายและสะดวกต่อการอ่านความเร็วรอบ
ซึ่งการอ่านความเร็วรอบสามารถเข้าไปซึ่งศึกษาได้ที่ลิ้งค์นี้นะครับ https://makerasia.com/esp32-reading-incremental-encoder-with-pulse-counterpcnt/?fbclid=IwAR2IwjU5F44mflFtv-_8USZDCv3NR-W5WJk23CMlfVWsDedH_fomC3qZhoM
จากสมการ
e เป็นแรงดันไฟฟ้าที่ตกคร่อมระหว่าง DC motor จากนั้นมาพิจารณารูปที่ 1 เราสามารถเขียนการไหลขอแรงดันไฟฟ้าได้ดังนี้
จากนั้นแทนสมการ e เข้าไปก็จะได้
เมื่อพิจารณา Ldi/dt เมื่อไหร่ที่กระแสไฟฟ้าคงที่จะทำให้ Ldi/dt = 0 เราก็จะได้สมการ electromotive force constant ดังนี้
จากนั้นเราก็หาค่า electromotive force constant
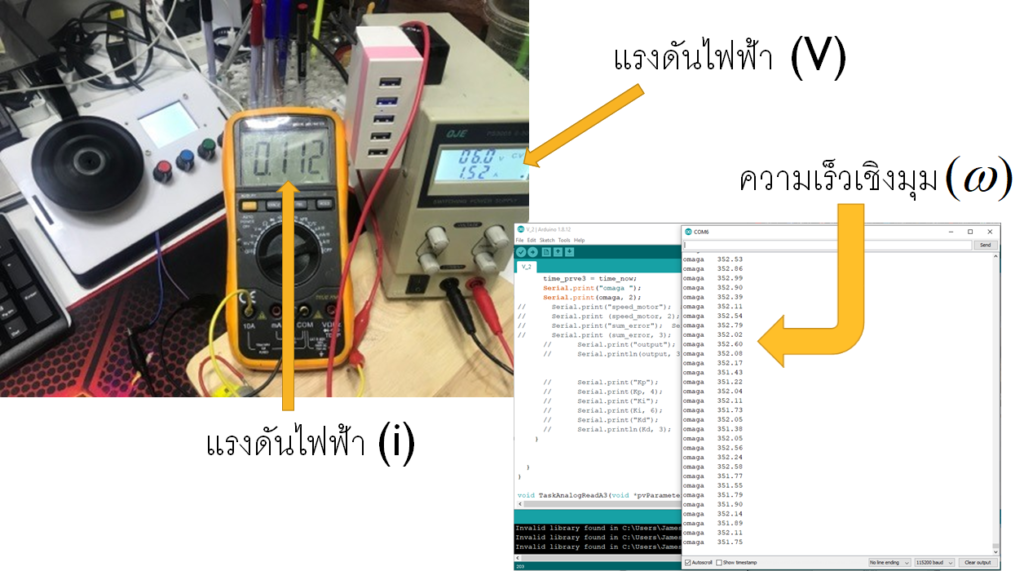
พอเราได้ค่าตัวเลขมาเราก็มาลองคำนวณกันดูครับ

6. (b) motor viscous friction constant เป็นค่าพารามิเตอร์ตัวสุดท้ายของเรานะครับ ในส่วนค่า motor viscous friction constant เราต้องมาพิจารณารูปที่ 1 ในส่วนของการเคลื่อนการหมุนของแผ่นวงกลมสามารถเขียนได้ดังนี้
จากนั้นแทนสมการแรงบิดก็จะได้ดังนี้
เมื่อไหร่ที่ความเร็วเชิงมุมหมุนคงที่จะทำให้ความเร่งเชิงมุมมีค่าเท่ากับ 0 ดังนั้น
จากนั้นก็นำค่า Kt จากที่เราทดสอบหามามาใช้ในการคำนวณ และนำความเร็วเชิงมุมกับกระแสไฟฟ้าที่หามาได้จากการทดสอบ Ke มาทดลองแทนค่ากันดูนะครับ

ก็บทความนี้ผมก็มาแนะนำวิธีการหาค่าพารามิเตอร์ของ DC motor เบื้องต้นนะครับ ยังไงเพื่อนๆ ก็ลองนำบทความนี้ไปทดลองทดสอบกันดูได้นะครับ ได้ผลเป็นอย่างไรมาเล่าสู่กันฟังได้นะครับ หากบทความนี้ผิดพลาดตรงไหนก็ขออภัยมา ณ ที่นี้ด้วยนะครับ